Viewing Systems |
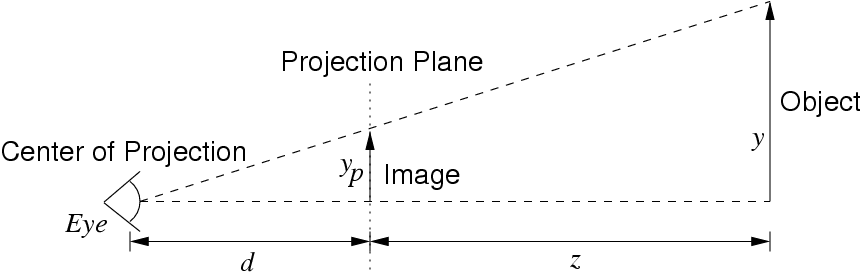
Now consider the following diagram of a synthetic camera:
Just as in the pinhole camera case, we can use similar triangles to determine the location of the image point on the projection plane (xp,yp) corresponding to the object point (x,y).